 3 months ago
43
3 months ago
43
Listen to this article

Artificial muscles are powering a new robotic leg developed by researchers at ETH Zurich and the Max Planck Institute for Intelligent Systems (MPI-IS). Inspired by living creatures, the robotic leg jumps across different terrains in an agile and energy-efficient manner.
As in humans and animals, an extensor and a flexor muscle ensure that the robot leg can move in both directions. These electro-hydraulic actuators, which the researchers call HASELs, are attached to the skeleton by tendons.
The actuators are oil-filled plastic bags, similar to those used to make ice cubes. About half of each bag is coated on either side with a black electrode made of a conductive material. Thomas Buchner, a doctoral student at ETH Zurich, explained that “as soon as we apply a voltage to the electrodes, they are attracted to each other due to static electricity. Similarly, when I rub a balloon against my head, my hair sticks to the balloon due to the same static electricity.” As one increases the voltage, the electrodes come closer and push the oil in the bag to one side, making the bag overall shorter.
Pairs of these actuators attached to a skeleton result in the same paired muscle movements as in living creatures: as one muscle shortens, its counterpart lengthens. The researchers use a computer code that communicates with high-voltage amplifiers to control which actuators contract, and which extend.
More efficient than electric motors
The researchers compared the energy efficiency of their robot leg with that of a conventional robotic leg powered by an electric motor. Among other things, they analyzed how much energy is unnecessarily converted into heat.
“On the infrared image, it’s easy to see that the motorized leg consumes much more energy if, say, it has to hold a bent position,” Buchner said. The temperature in the electro-hydraulic leg, in contrast, remains the same. This is because the artificial muscle is electrostatic. “It’s like the example with the balloon and the hair, where the hair stays stuck to the balloon for quite a long time,” Buchner added. “Typically, electric motor driven robots need heat management which requires additional heat sinks or fans for diffusing the heat to the air. Our system doesn’t require them,” said Toshihiko Fukushima, a doctoral student at ETH Zurich.

Robot leg has agile movement over uneven terrain
The robotic leg’s ability to jump is based on its ability to lift its own weight explosively. The researchers also showed that the robotic leg has a high degree of adaptability, which is particularly important for soft robotics. Only if the musculoskeletal system has sufficient elasticity can it adapt flexibly to the terrain in question.
“It’s no different with living creatures. If we can’t bend our knees, for example, walking on an uneven surface becomes much more difficult,” said Robert Katzschmann, who founded and runs the Soft Robotics Lab at ETH Zurich. “Just think of taking a step down from the pavement onto the road.”
In contrast to electric motors requiring sensors to constantly tell what angle the robotic leg is at, the artificial muscle adapts to suitable position through the interaction with the environment. This is driven just by two input signals: one to bend the joint and one to extend it.
“Adapting to the terrain is a key aspect. When a person lands after jumping into the air, they don’t have to think in advance about whether they should bend their knees at a 90-degree or a 70-degree angle,” Fukushima. The same principle applies to the robotic leg’s musculoskeletal system: upon landing, the leg joint adaptively moves into a suitable angle depending on whether the surface is hard or soft.
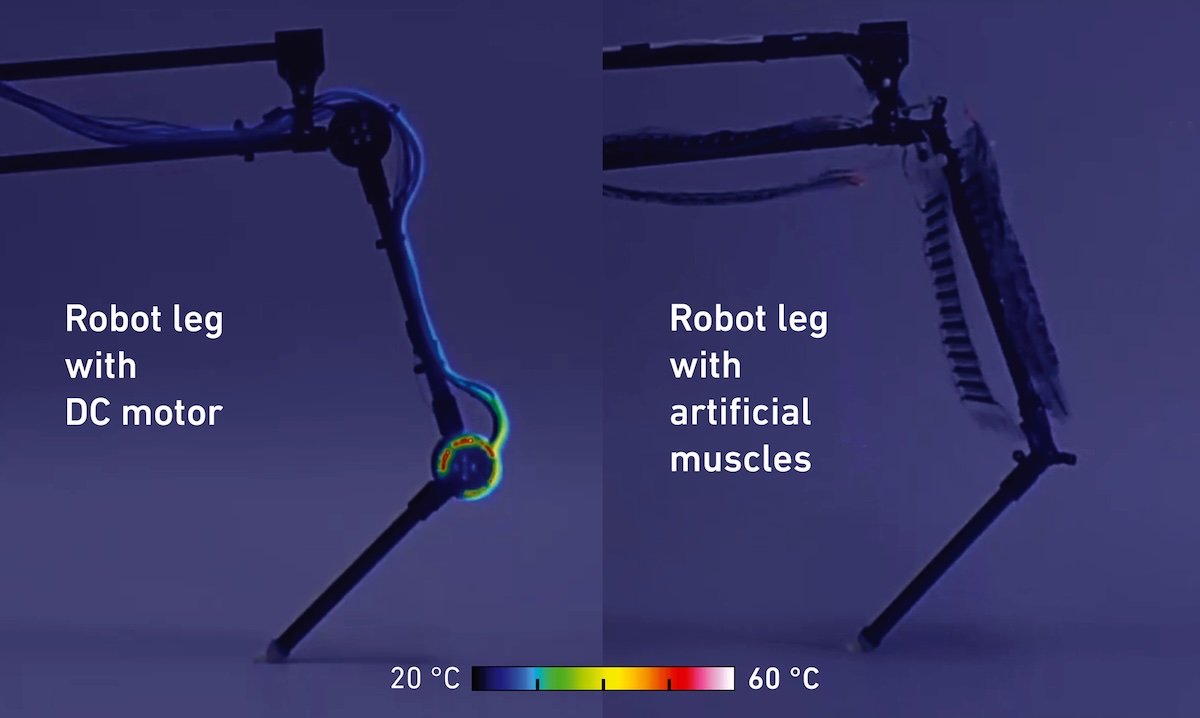
When robotic legs have to hold a certain position for a long time, a lot of current flows through the DC motor that drives them (left). Over time, energy is lost in the form of heat. In contrast, the artificial muscles (right), which work on the principle of electrostatics and are efficient, remain cold, because no current flows through them under a constant load. | Credit: ETH Zurich and MPI-IS
Emerging technology opens up new possibilities
The research field of electro-hydraulic actuators is still young, having emerged only around six years ago. “The field of robotics is making rapid progress with advanced controls and machine learning; in contrast, there has been much less progress with robotic hardware, which is equally important.”
Katzschmann added that electro-hydraulic actuators are unlikely to be used in heavy machinery on construction sites, but they do offer specific advantages over standard electric motors. This is particularly evident in applications such as grippers, where the movements have to be highly customized depending on whether the object being gripped is, for example, a ball, an egg or a tomato.
Katzschmann does have one reservation: “Compared to walking robots with electric motors, our system is still limited. The leg is currently attached to a rod, jumps in circles and can’t yet move freely.”
Future work should overcome these limitations, opening the door to developing real walking robots with artificial muscles. He further elaborates: “If we combine the robotic leg in a quadruped robot or a humanoid robot with two legs, maybe one day, when it is battery-powered, we can deploy it as a rescue robot.”
Editor’s Note: This article was republished from ETH Zurich.





 English (US) ·
English (US) ·