 1 month ago
24
1 month ago
24
Listen to this article


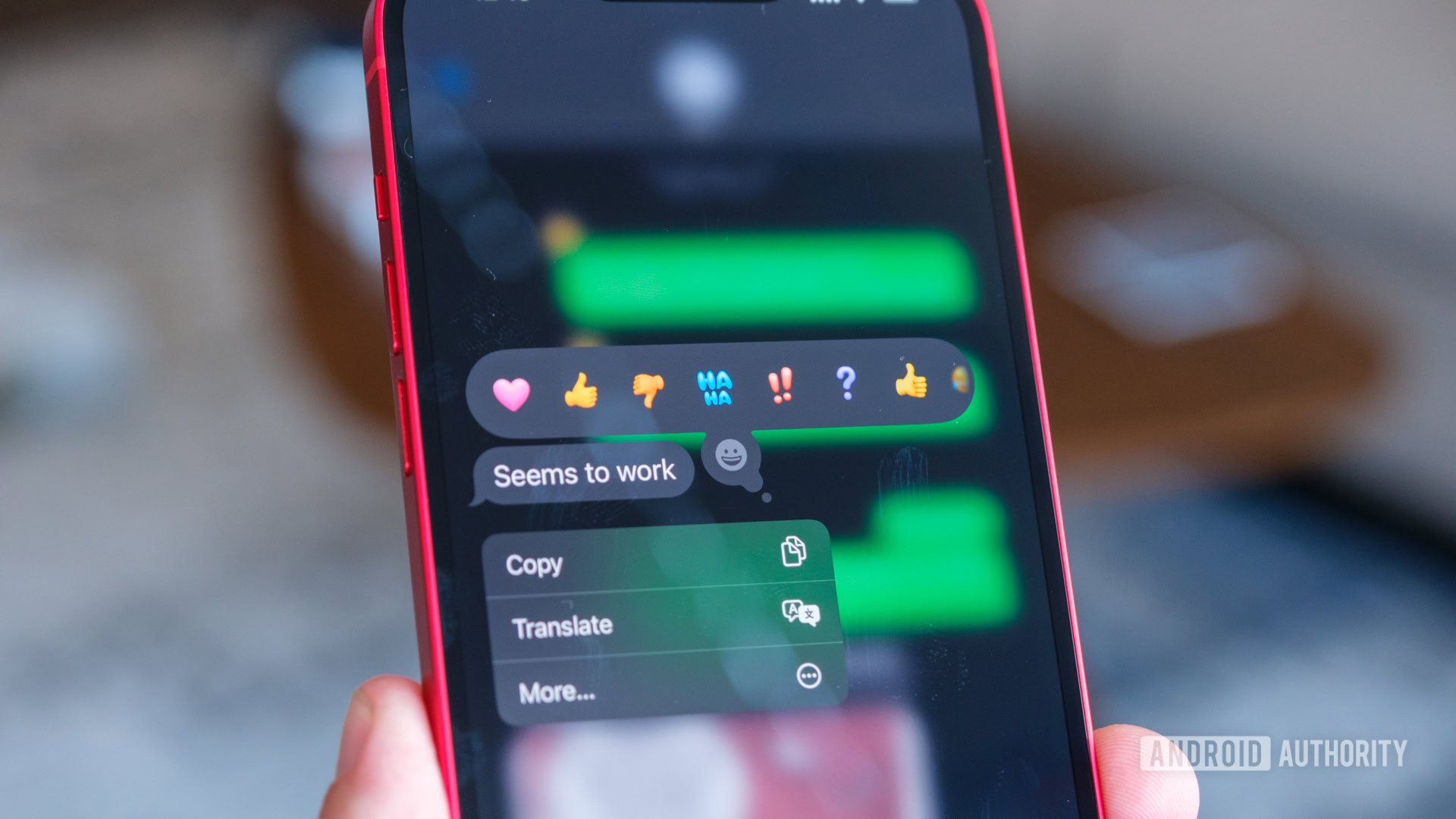
The Kinisi KR1 uses a wheeled base and robot arm to fulfill use cases in a warehouse. | Credit: Kinisi Robotics
Brennand Pierce is the founder and CEO of Kinisi Robotics. He started the company in late 2023 after co-founding restaurant robotics company Bear Robotics and spending a couple of years consulting on robotics design in adjacent markets.
Kinisi is developing one-armed mobile manipulators to autonomously pick items from shelves and place them into totes or boxes. The goal is to improve warehouse efficiency and reduce labor costs. These robots are designed to work safely alongside humans and can adapt to various warehouse environments through machine learning.
In light of the current frenzy over humanoids, Pierce believes wheeled, mobile manipulators are the ideal platform for this use case. We recently had Pierce on The Robot Report Podcast, and the following is an edited excerpt from that conversation. You can listen to the entire interview here.
Tell us about your experience as a robotics consultant before starting Kinisi.
Pierce: I’ve been doing robotics now for almost 20 years. I’ve always loved robots, growing up reading books, sci-fi books, and watching movies. And after university, where I studied computer science, one of my hobbies was these 40-centimeter-high robots from Japan. The hobby turned into an obsession, and my front room had just turned into this crazy robotic lab. And it just got to the point where I wanted bigger everything.
Bristol Robotics Lab was formed around that time, and it seemed like something came to me – I have to do this professionally. So I left the software world and became a roboticist.
And then I spent roughly the next 10 years in academia. I didn’t want to stay there, but at the time, robotics was a boring place. There wasn’t anything exciting in the real world. So I spent a long time doing humanoid robotics. I worked for Samsung on a project at [Carnegie Mellon University], and I was doing a PhD in low-cost humanoid robots at TUM in Munich. But I always wanted to get back into the industry.
Around 2014 or 2015, you started to see all these Savioke’s, Fetch’s, and all these other companies in the ROS community starting to spin out. And I just thought it was time to start a company. I thought that mobile robotics was practical if you could move something from A to B.
That’s where I started my first company, Robotise GmbH, looking at [creating a mobile robot] for hotels. And the more that I looked into it, I realized that it wasn’t an ideal space.
Then, luckily enough, I met my co-founders of Bear Robotics and we started working in the restaurant industry. There, it seemed like there was a very good user case. From the very start, we just got a TurtleBot, and within a week we had a simple prototype where we could take the check or the bill from the cashier to the table and back, and the staff just loved it. We suddenly saw we’re onto something great and then seven years later I think we’ve shipped over 10,000 robots around the world and [hired] I think like 200 employees.
What are some of the things you learned in your experience at Bear Robotics?
The [big] one is how do you take a robot from a TurtleBot [platform], put some profiles and a tray on top of it, and have your first prototype. Then you need to have a business case for it. I think for robotics, there are four steps in the company’s progression. You start with the one-offs, you then get to the double digits up to like 50, 60, and you’re [building all] those in-house. Then you end up in this weird, some might say “Valley of Death” between like 100 and a thousand robots. You’re not big enough to get a contract manufacturer interested in building your product. And you’re too small to invest in massive tooling to build it yourself.
It’s when you get to a thousand plus units that I think you can become a robot company. Because then you can die cast the parts you need, and you can get a proper contract manufacturer involved, and you can set up a proper production line. And that’s when the cost of the robot does substantially go down.
Kinisi Robotics is building a mobile manipulator. What are the applications you’re looking to deploy this into?
About two years ago, I was doing a lot of consultancy for companies. I was going to IROS, ICRA, and these robot conferences. And one thing I saw there was it looked like navigation, control and computer vision were becoming very mature. I started to think about what is it you could do. When I was at university, I’d made a couple of mobile manipulators, and I’d been working on the PR2 doing kitchen scenarios.
I think the next wave will be mobile manipulation. And for the last year and a half, I’ve been thinking about where is it that you can start deploying mobile manipulation.

Brennand Pierce is the founder and CEO of Kinisi Robotics. | Credit: Kinisi Robotics
What is that key task? I don’t have a 100% answer yet. A lot of people are saying, do you just pick up a tote, and move it around, like warehouse picking? I’ve even been talking to restaurants, looking at flipping burgers, running the fryer, and things like that. That’s similar to what Miso did with Flippy, but do it in a mobile form.
We’ve built a working prototype with an end-to-end solution. I’ve been using OpenAI’s assistant as the logic that glues it all together. It knows how to move an arm. It knows how to open and close a gripper. It has a list of destinations like the kitchen, my desk, all of these things. It knows how to control the robot and then you can ask it to go to the kitchen or pick up the can of Coke. It can understand these commands, write the rules, and execute them. One of the other interesting parts of that, which I don’t think you could do in classical control, is you could ask it high-level tasks where it needs to know some logic.
So I use the example when I was talking to a grocery store about packing a grocery box. They had a problem with old pick-and-place systems where the robot didn’t know that raspberries can’t go on the bottom, that flowers are delicate, or that you should be putting heavy tins at the bottom of these boxes. Think of your HelloFresh and all of these delivery services. Now you can give these LLMs, a list of items, and ask what order you should pack them in. It gives you a very accurate task-by-task of how you meant to pack a box. So this is where I’m looking at, where can you deploy this and what can it solve?

You’ve made the design choice to put the KR1 on a wheeled base and to start with a single arm. Ultimately, I suppose you’ll get to more arms with this, but tell me about your philosophy about mobile manipulation.
When thinking about humanoids, I think 80 % of the tasks that they’re aiming for, you don’t need legs. You know the classic warehouse factory where every office you go to there’s an elevator. Every floor I ever see is flat in most places. Why would I ever want to put 14 or 12 motors? Compared to expensive harmonic drives, I can just have two wheels that cost $200 and it’s dynamically stable you could put big batteries in there and you know you don’t have all of these problems.
When you’re a startup, one bit of advice I was given before is you have to just concentrate on two things. You can only innovate on those two things. And if you look at my company with mobile manipulation, it’s how do you actually interact with the world and manipulate it? We don’t have to worry about navigation. We’re just literally looking at how to use AI to actually pick stuff in an unstructured environment and that’s all we’re really focused on. If you’re a humanoid company, you’re also going to have to be the first person to ever figure out how you are going to deploy a humanoid robot that could just walk around. In an unstructured space, you have to figure out what happens if someone hits the emergency stop button. How does it fall over?
You see these great videos of Boston Dynamics and they’re very much in this controlled environment. They basically have two problems to solve: walking and manipulation. The complexity of a humanoid robot is a lot harder to design than a mobile manipulator. I can just get off-the-shelf activators shipped over from China in five days.
When you have a mobile [wheeled] base, weight doesn’t matter. Whereas if you’re designing a high-power humanoid robot, you’re now having to worry about inertia, the weight of the arms, the legs. You’re even worried about how heavy the battery is. I can just go and get very cheap batteries and put them in the base where the weight of them is actually an advantage to have a sturdy, heavy base [for the manipulator]
I think a lot of these [humanoid robot] companies have bitten off more than they can chew to try to commercialize it.
At the end of the day, that’s what we do, right? Ship robots.
I always think about Magic Leap with virtual reality (VR). It burnt through billions because it was going to be this bleeding edge VR headset, but then Oculus Rift just came out with something very simple and shipped it. So do you want to be the same analog, do you want to be there developing all these end-to-end or do you, which is my philosophy, just start getting going. NVIDIA, Google, and other trillion-dollar companies are working on these foundational models and, from my experience, that just trickles down, and then we have robots in the field that you can deploy it on.
Editor’s Note: You can listen to the full interview with Bren Pierce on The Robot Report Podcast.





 English (US) ·
English (US) ·